Sie können ein Beschleunigungsmessersignal tiefpassfiltern. Der Schwerkraftvektor liegt bei DC. Die Verwendung eines 2-Achsen-Beschleunigungsmessers wie des Analog Devices ADXL202 sollte für ein Flugzeug ausreichen.
Hier ist ein ausgezeichneter Artikel über die gesamte Mathematik.
Was passiert, wenn der Benutzer die Platte plötzlich nach vorne bewegt?
Sie verwechseln das Konzept der Übersetzung (Positionsänderung) mit der Einstellung (Orientierung). Wenn sich die Platte plötzlich vorwärts bewegt (reine Übersetzung), möchten Sie im Idealfall keine Änderung der Ausgabe sehen (die Einstellung hat sich nicht geändert).
Wenn der Benutzer die Platte plötzlich nach vorne kippt , spiegelt der Gleichstromwert nach einer unendlichen Zeitspanne diese Änderung ebenfalls korrekt und ausschließlich wider.
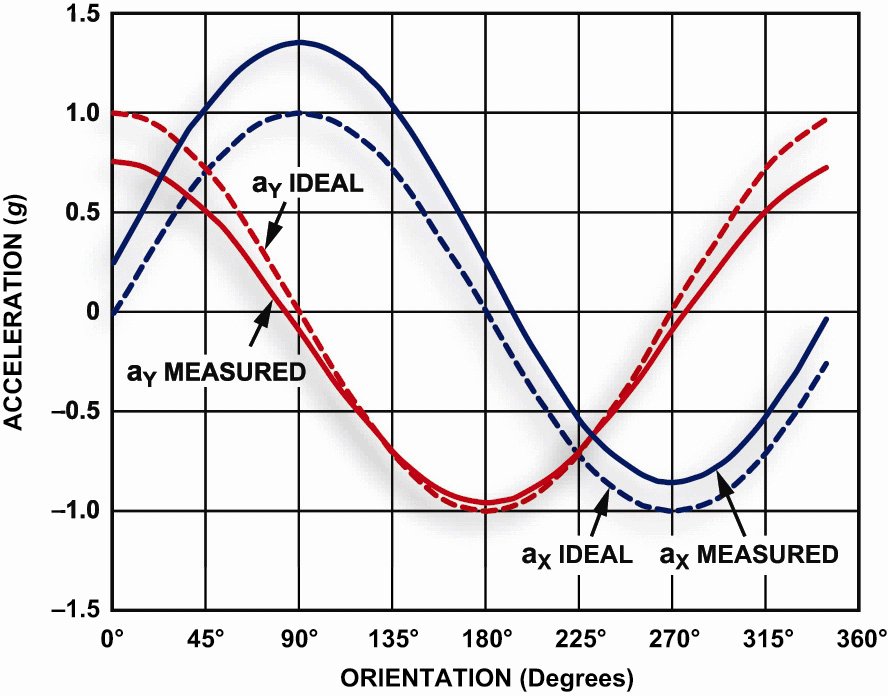
Ein Beschleunigungsmesser misst Beschleunigung. Die Beschleunigung wird durch Gewalt verursacht. Die Schwerkraft ist eine Kraft. Die Schwerkraft basiert auf Massenbeziehungen, Trennungsabstand und dem Winkel zwischen den Vektoren. Da sich weder die Masse der Platte noch die Masse der Erde ändert, ist der Abstand (in jeder Hinsicht unverändert) für einen bestimmten Winkel (Neigung) die Schwerkraft eine konstante Kraft. Dinge, die konstant sind, haben eine Frequenz von 0 (z. B. "DC").
Jeder gegebene Neigungswinkel entspricht einem (und nur einem) Kraftvektor auf der Platte um 180 Grad.
Das Problem in a Praktisches System ist, dass Sie nicht unendlich lange warten können, um zu bemerken, dass sich die Einstellung geändert hat. Sie müssen also, wie alles in der Technik, Kompromisse zwischen den Anforderungen eingehen. Deshalb habe ich den Ansatz eines Tiefpassfilters vorgeschlagen. Wo Sie den Filter in die Enge treiben, bestimmt der Filter (kurzfristig) den Kompromiss zwischen Selektivität und Genauigkeit.
In praktischen Systemen können Sie irgendwo um 10 Hz in die Enge treiben und normalerweise in Ordnung sein (die meisten Handys verwenden diesen Ansatz) Der von Ihnen bereitgestellte
-Link setzt einen dreiachsigen Beschleunigungsmesser
voraus
Die dritte Achse ist nur dann unbedingt erforderlich, wenn Sie das Gieren (über den Kreisel) erkennen oder die Fluglage durch beide Hemisphären (über den Beschleunigungsmesser) eindeutig bestimmen müssen, was die ursprüngliche Frage explizit als unerwünschte Bewegung zu ignorieren scheint. Wenn diese Annahme meinerseits falsch ist, kann das OP je nach Wunsch einen 3-Achsen-Beschleunigungsmesser oder einen 2-Achsen + 1-Achsen-Kreisel verwenden. Deshalb habe ich gesagt, "sollte ausreichen".
Ich würde mit einem Kreisel fahren ...
Wenn Sie versuchen, die Kosten zu minimieren / Leistung, dann ist die Verwendung eines Gyroskops für sich genommen eine schlechte Wahl in Bezug auf den vorgeschlagenen Beschleunigungsmesser. In der von Ihnen beschriebenen Neigungserfassungsanwendung entwickelt der Kreisel einen Neigungsfehler, der ohne Bindung weiter zunimmt, da er nur Rotationsbeschleunigungen misst, die Sie integrieren müssen, um die Position zu finden ( Neigung).
Wenn Sie den Kreisel neigen, sehen Sie eine Änderung der Ausgangsspannung, die jedoch schnell auf den Ruhepegel zurückkehrt, wenn die neue Einstellung (Neigung) beibehalten wird. Dies führt zu zwei unerwünschten Problemen:
- Es wird extrem empfindlich gegen Erschütterungen (Schütteln und andere vorübergehende Störungen).
- Fehler häufen sich sehr schnell und müssen Setzen Sie sich daher von Zeit zu Zeit auf einen bekannten Wert zurück, indem Sie ihn mit einer anderen Datenquelle (wie dem vorgeschlagenen Beschleunigungsmesser) korrelieren.
ol> Hier sind Daten aus einem von David Anderson durchgeführten Experiment auf seinem selbstausgleichenden Roboter:
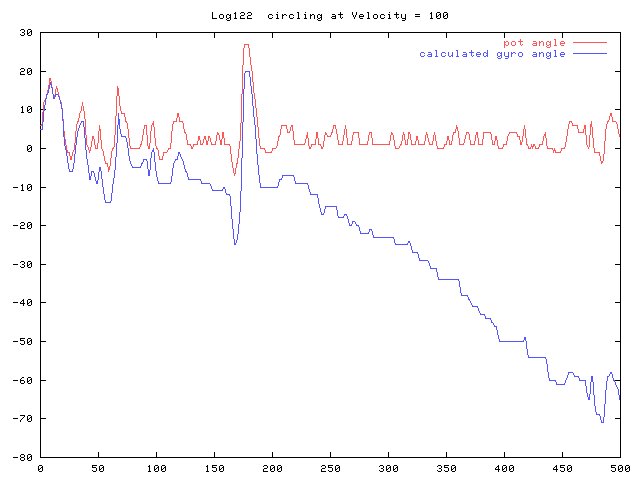
Beachten Sie, wie der Fehler (Unterschied zwischen der blauen und der roten Linie) schnell von der Grundwahrheit.
Im Gegensatz dazu misst der Beschleunigungsmesser die Neigung direkt , sodass sich kein Fehler ansammelt. Im Kreisel ist jede Neigungsschätzung eine Funktion aller vorherigen Messungen (Fehler häufen sich). Im Beschleunigungsmesser basiert jede Schätzung der Neigung nur auf dem aktuellen Messwert (in erster Ordnung).